-
Bonjour!
Nous sommes heureux de vous retrouver chers lecteurs, accompagné de notre professeur Mr Behilil, nous commencerons par vous dire le nombre d'appuis minimum pour garantir la stabilité de votre robot: il en faut 3! La surface de sustentation se nomme un accueil de la roue.
Le centre de gravité doit se situer au centre du robot pour toutes éventualités, pour se qui concerne l'intérêt de positionner les composants les plus lourds du robot au plus proche de la base est qu'il donne plus de mobilité. Parmi ces solutions d'agacements d'appuis proposées ci-dessus, voici les bonnes solutions qui garantissent une stabilité pour le robot :
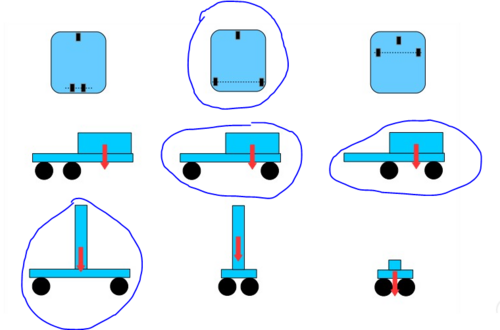
parmi ces robots à pattes, la solution la plus la plus simple à mettre en œuvre pour garantir la stabilité serait de prendre le robot à six pattes.
C'était le deuxième article des Shiroi ōkami!
 votre commentaire
votre commentaire
-
Bienvenu sur notre blog! Nous sommes les Shiroi ōkami!
Notre blog consiste a vous présenté le robot pompier prospector, après avoir reçu un mail du commandant des sapeurs-pompiers d'Asnières-Sur-Seine. Pour commencer, nous allons vous montrer les critères à prendre en compte pour la conception, qui sont: la stabilité, le prix et la légèreté.
Deuxièmement nous vous exposerons le nombres de familles de solutions techniques qui existe pour déplacer un robot au sol, qui sont au nombres de 5!
Voici, ci-dessous, un tableau montrant les avantages et les inconvénients pour chaque solution technique proposée dedans

Si on devait classer ces solutions techniques du moins couteux au plus couteux on irait dans ce sens :
six pattes/trois roues/deux jambes/chenilles.
C'était le 1er article des Shiroi ōkami!
1 commentaire Suivre le flux RSS des articles Suivre le flux RSS des commentaires
Suivre le flux RSS des articles Suivre le flux RSS des commentaires

|
|
|
|